BaseGsDetector#
- class mobgap.gait_sequences.base.BaseGsDetector[source]#
Base class for GS-detectors.
This base class should be used for all gait sequence detection algorithms. Algorithms should implement the
detectmethod, which will perform all relevant processing steps. The method should then return the instance of the class, with thegs_list_attribute set to the detected gait sequences. Further, the detect method should setself.dataandself.sampling_rate_hzto the parameters passed to the method.We allow that subclasses specify further parameters for the detect methods (hence, this baseclass supports
**kwargs). However, you should only use them, if you really need them and apply active checks, that they are passed correctly. In 99% of the time, you should add a new parameter to the algorithm itself, instead of adding a new parameter to the detect method.- Other Parameters:
- data
The raw IMU data in the body frame passed to the
detectmethod.- sampling_rate_hz
The sampling rate of the IMU data in Hz passed to the
detectmethod.
- Attributes:
- gs_list_
A dataframe specifying the detected gait sequences. The dataframe has a
startandendcolumn, specifying the start and end index of the gait sequence. The values are specified as samples after the start of the recording (i.e. the start of thedata).
Notes
You can use the
base_gsd_docfillerdecorator to fill common parts of the docstring for your subclass. See the source of this class for an example.Methods
clone()Create a new instance of the class with all parameters copied over.
detect(data, *, sampling_rate_hz, **kwargs)Detect gait sequences in the passed data.
get_params([deep])Get parameters for this algorithm.
self_optimize(data_sequences, ...)Optimize the internal parameters of the algorithm.
set_params(**params)Set the parameters of this Algorithm.
- __init__(*args, **kwargs)#
- clone() Self[source]#
Create a new instance of the class with all parameters copied over.
This will create a new instance of the class itself and all nested objects
- detect( ) Self[source]#
Detect gait sequences in the passed data.
- Parameters:
- data
The raw IMU data in the body frame.
- sampling_rate_hz
The sampling rate of the IMU data in Hz.
- Returns:
- self
The instance of the class with the
gs_list_attribute set to the detected gait sequences.
- get_params(deep: bool = True) dict[str, Any][source]#
Get parameters for this algorithm.
- Parameters:
- deep
Only relevant if object contains nested algorithm objects. If this is the case and deep is True, the params of these nested objects are included in the output using a prefix like
nested_object_name__(Note the two “_” at the end)
- Returns:
- params
Parameter names mapped to their values.
- self_optimize(
- data_sequences: Iterable[DataFrame],
- ref_gsd_list_per_sequence: Iterable[DataFrame],
- *,
- sampling_rate_hz: float | Iterable[float],
- **kwargs: Unpack[dict[str, Any]],
Optimize the internal parameters of the algorithm.
This is only relevant for algorithms that have a special internal optimization approach (like ML based algos).
- Parameters:
- data_sequences
A sequence/iterable/list of dataframes, each containing the raw IMU data of a single sensor. This could be individual trials or data from different participants. The optimization will be performed over all sequences combined.
- ref_gsd_list_per_sequence
A sequence/iterable/list of gsd-list, each containing the reference gait sequences for the respective data sequence. They are used as ground-truth to validate the output of the algorithm during optimization.
- sampling_rate_hz
The sampling rate of the IMU data in Hz. This can either be a single float, in case all sequences have the same sampling rate, or a sequence of floats, in case the sampling rate differs between the sequences.
- Returns:
- self
The instance of the class with the internal parameters optimized.
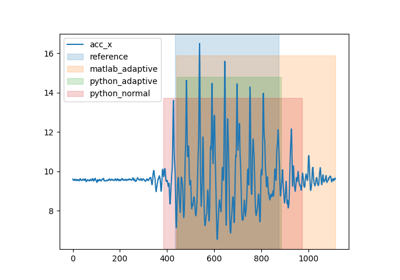
Examples using mobgap.gait_sequences.base.BaseGsDetector#